Future mobility development starts to realise comfortable mobility for each and every person
Research and development of next-generation mobility can also be carried out from an unprecedentedly innovative perspective by focusing on the vitality of short-distance, one-person mobility. For example, if the mobility is limited to short distances, large motors and batteries will no longer be necessary, and the vehicle itself can be made even smaller if the focus is on one-person mobility. By focusing on the actual citizens who use the vehicle and their behavioural styles, it is possible to create a new type of mobility that has never been seen before. Until now, mobility has aimed for a high degree of versatility so that it can be used by a wide range of people for all purposes. As a result, a misalignment with diverse lifestyles has begun to emerge.
In the Kashiwa ITS Smart City, new mobility will be created to suit people and communities, rather than to suit mobility to people’s lifestyles. New mobility with various features will support comfortable and convenient mobility for each and every Kashiwa citizen. This is the true ‘mode-free’ we are aiming for. The Kashiwa ITS Promotion Council will continue to listen to even the smallest requests from citizens as it conducts new research. Our aim is to develop this into a transport system that will one day revitalise the entire region.
Capacitor-equipped ultra-compact electric vehicles/contactless power transmission system – super capacitor-equipped ultra-compact electric vehicles (capacitor EVs) and wireless power transfer.
Current electric vehicles have problems caused by battery performance, such as long charging times and short cruising distances. To solve this problem, research and development is being conducted by various organisations to improve battery performance. However, if it were possible to change the perspective and automatically charge the batteries with high power everywhere in the city, it would be possible to extend the cruising range of electric vehicles without spending time and money to improve the battery performance. Wireless charging and supercapacitors will make this possible.
If wireless power transfer to electric vehicles becomes possible, it will not only be possible to charge the batteries in parking lots, but also while the vehicle is stopped at red lights at intersections and while the vehicle is running on highways. The Hori Laboratory, Graduate School of Frontier Sciences, The University of Tokyo is conducting joint research with the National Institute for Land and Infrastructure Management on wireless power transfer to electric vehicles in motion.
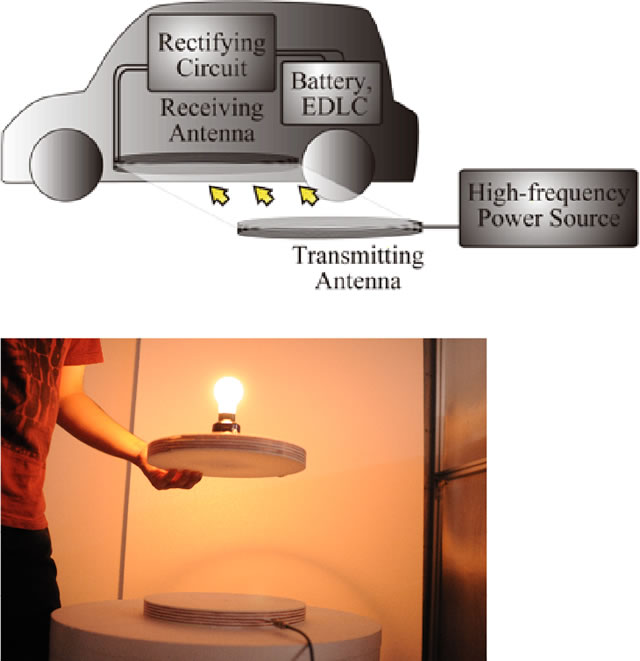
The use of magnetic field resonance coupling is being considered as a method for wireless power transfer. Magnetic field resonance coupling is a method of transmitting power by using electrical resonance between a coil and a capacitor. A power transmitter and a power receiver are placed opposite each other, and power is transmitted between them. The transmitter/receiver consists of a resonant circuit with a coil and capacitor, and a high-frequency voltage equal to the resonant frequency is applied to realise highly efficient power transmission. The power transmission frequency used is approximately 100 kHz to 20 MHz.
This method can achieve higher transmission efficiency over larger transmission distances than conventional methods using electromagnetic induction. Experimental results from our laboratory show that a transmission efficiency of 96% is achieved at a resonance frequency of 13.56 MHz and a transmission distance of 20 cm using a transmitter/receiver with a diameter of 30 cm. In another experiment, a total efficiency of 90%, including the efficiency of the high-frequency power supply and rectifier, was achieved at approximately 100 KHz, a transmission distance of 20 cm and a receiving power of 3.3 kW.
In wireless power transfer to running electric vehicles, it is necessary to lengthen the transmission section. The use of repeaters is therefore being considered to extend the feed section. Repeaters do not have any electrical connection to the power supply or the power transmitter, and can be simply aligned in the direction of travel, making it possible to construct a low-cost power supply system.
Unlike batteries, supercapacitors can charge and discharge large currents, enabling ultra-fast power supply, with charging completed in a few minutes. In addition, batteries use chemical reactions that deteriorate over time, whereas supercapacitors are charged by physical charge accumulation and therefore do not deteriorate even when charging and discharging large amounts of power. These supercapacitors are mounted on ultra-compact electric vehicles, enabling them to run for 15 minutes on a 15-second charge.
The combination of wireless power transfer and supercapacitors will enable the electric vehicles of the future.


Personal mobility vehicles – Personal mobility vehicles: creating new ways of getting around
From the perspective of global environmental protection and the ageing of society, it is becoming increasingly necessary to construct people- and environment-friendly spaces for movement on streets, footpaths and inside facilities, which form an important part of daily life. New modes of transport are required that cannot be covered by conventional car transport or public transport such as railways alone. Therefore, personal mobility vehicles (PMVs) are expected to offer convenience and flexibility in combination with public transport and cars. The characteristics that a new means of personal mobility vehicle, i.e. a PMV, should have are listed here as follows
- Comfortable and efficient short- and medium-distance mobility with human- and environment-friendly power.
- They are safe to use in mixed pedestrian environments, not only in road spaces but also on footpaths and in facilities.
- They are portable enough to be carried on public transport such as railways and in cars.
[Design and development]
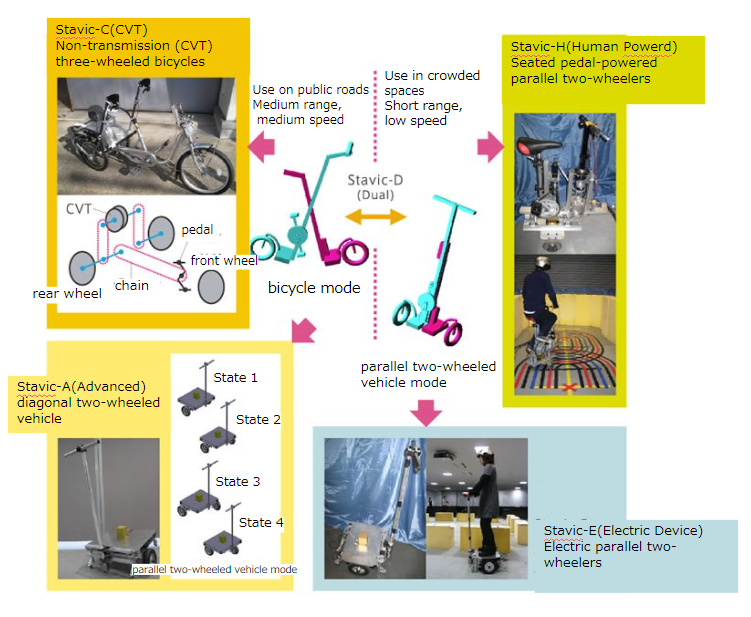
Various methods of PMV have been proposed and studied. It is expected that different PMVs will continue to be proposed in the future. Here, a ‘hybrid PMV’ (Stavic-D) has been proposed, which has two modes – bicycle mode and parallel two-wheeled vehicle mode – that are mechanically variable between each other and can be used in different ways depending on the situation.
As for the variable mode switching, the concept is to use the vehicle as a bicycle mode with two in-line wheels when travelling at medium to high speeds and as a parallel two-wheel mode when travelling at low speeds. From these concepts, a new idea was conceived. It is a three-wheel bicycle type (Stavic-C) with one front wheel and two rear wheels with a steering function and a new control system that turns by varying the speed of the two rear wheels.
In addition, a mechanism to improve running stability is also being considered. A two-wheeled vehicle with two different structures will also be developed. The first is a seated pedal-powered parallel two-wheeler (Stavic-H). Its advantages are that it can travel for longer periods of time than a standing vehicle, and it is easy to make the posture stabilisation control and drive control independent. There are three possible drive systems: human-powered only, all-electric (Stavic-E) and assisted. Another design, the diagonal mode (Stavic-A), is a two-wheeled vehicle with a displaced axle. New research and development will be developed using that mode. A four-wheeled version of PMV (Stavic-4S) is also under consideration.
[Acceptability to the traffic environment and affinity to the walking environment]
For PMVs to cooperate with humans, not only cooperation with the driver, but also acceptability to the traffic environment and affinity to the walking environment are important issues. As an example of research, the results of an evaluation experiment on the sense of security when an electric parallel two-wheel vehicle enters a mixed pedestrian space are presented. Based on experiments with mixed pedestrian traffic, the affinity to pedestrians at low speeds is subject to significant changes depending on the form and speed of the vehicle. Measurement experiments using PMVs have also provided a reasonable explanation for the change in affinity depending on the form and speed of the vehicle.
■Future projections.
■ Personal Mobility Vehicles (PMVs)